モーターコントロールとは
公開日:2016年7月25日 09時00分
更新日:2019年2月 1日 17時19分
モーターコントロール(運動制御)とは
モーターコントロール(運動制御)の理論はリハビリテーションを実施する理学療法士、作業療法士においては学ぶべきものとされており、モーターコントロール・運動制御・姿勢制御という言葉は、一度は耳にしたことがあるかと思います。
理学療法士・作業療法士にとっての教科書でもあるAnne Shumway-CookとMajorie H.Woollacott著書の「モーターコントロール」では、モーターコントロール(運動制御)は「運動の幹的メカニズムを統制もしくは指揮する能力」1)と定義されています。また、「運動するために必要なさまざまな機構を調整する能力である」1)とあります。
運動制御の「制御」とは思い通りに動かすという意味で、目的とする運動を行うためにどのような脳・脊髄(中枢神経系)の機能が関わっているのか、関節や筋肉の強調した動きが実行されるまでの処理や伝達はどのように行われているのか、運動の課題や環境によってどのような影響を受けるのか、受け取った感覚情報はどのように知覚・認知され運動に結びつくのかなどを考え、臨床の場で評価やアプローチを実施していきます。
運動制御の「運動」とはエクササイズではなく、歩く、走る、手を伸ばす、物品を操作する、食べる、コミュニケーションをとる、働くなど、人が生きていくためのすべてのことを指しています。
運動の本質
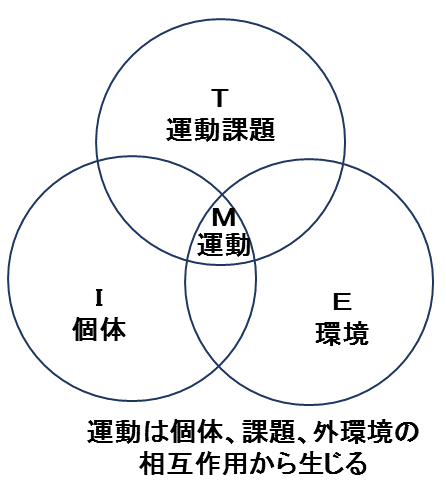
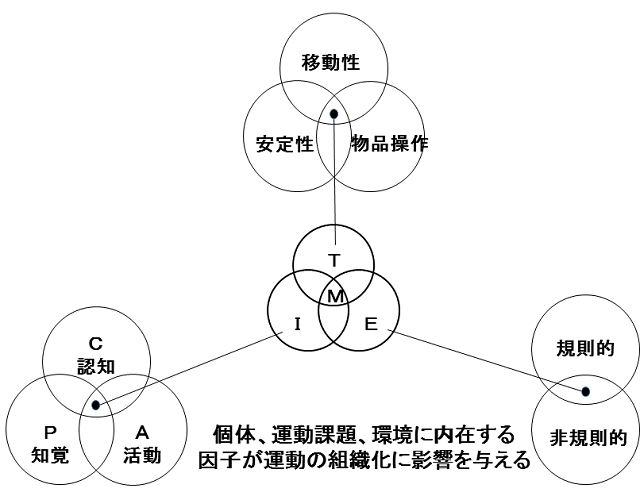
運動は、運動を行う人(個体)、どのような運動を行うか(運動課題)、運動を行う環境(環境)の相互作用から成り立っています。さらに、個体・運動課題・環境には以下の因子が相互に作用しあっています(図1、図2)。
個体
- 知覚
- 認知
- 活動(運動は活動と関連する)
運動課題
- 安定性(安定した面での座位か不安定な面での立位か、また変化に富む運動かパターン化した運動か)
- 移動性(動かない平面を歩くか、凹凸や斜面、動きのある面を歩くか)
- 物品操作
環境
- 規則的特性(地面の状態や操作する物品の形や大きさ、重さなど目的とする運動を達成するために従わなくてはならないもの)
- 非規則的特性(周囲の騒音、明るさなど目的とする運動を達成するために従うべきものではないけれども運動に影響するもの)
運動制御理論
運動がどのようにして制御されるのかということを説明する運動制御理論は時代とともに進化・発展してきました。誰もが納得できる運動制御理論はまだ見つかっていませんが、それぞれの理論から導き出される理解が臨床へと応用されています。
反射理論
連鎖した反射が組み合わさった複雑な反射が運動であるという概念です。運動を反射だけで説明することはできませんが、運動の中の反射をどう活用していくかということを考えていくことに応用できます。
階層理論
脳の上位レベルが下位レベルを制御しているトップダウン(上から下)の関係で、上位は高次連合野、中位は運動野、下位は脊髄レベルでの運動制御に該当するという概念です。大脳皮質レベルが障害されることによって脊髄レベルで支配される反射が出現し、病的な反射がみられるという理解につながっています。
運動プログラム理論
中枢神経内の上位レベルで運動プログラムが保存されており、身体の各部位へと伝えられて運動が起こるという概念です。中枢運動プログラムだけで運動を説明することはできませんが、フィードバック※1なしでも目的の運動を微調整して柔軟に生成できるということが理解できます。
システム理論
反射理論、階層理論、システム理論で説明されてきた運動は神経系から伝えられるという点に加えて、身体全体が機械系であり、筋骨格系や重力や慣性力といったいろいろな要因が相互に作用しあって運動が生まれるという概念です。
生態学的理論
赤ちゃんが環境を探索して知覚し、運動を生成・修正していくように、環境の知覚が重要であるという概念です。神経系との関連はあまり注目されていないところがあります。
- ※1 フィードバック:
- フィードバックとは結果を原因側に戻して反映すること。運動時に受けた感覚情報から目的とする運動を起こすために行われる姿勢・運動の再調整。
これらの理論によって、それまでの臨床では筋肉レベルへのアプローチである筋再教育治療法が主流であったのが、反射理論、階層理論から神経促通法※2が編み出され、現在では課題指向型アプローチが主流となっています。
- ※2 神経促通法:
- 神経促通法とは、固有受容性神経筋促通法(PNF)をはじめ、中枢神経系の調整を意識し、目的とする運動制御を促通するアプローチのこと。
課題指向型アプローチ
運動パターンを繰り返し練習して決まった運動パターンを覚えるのではなく、目的とする運動(課題)を達成するための機能の改善・獲得、戦略の学習、環境の変化への適応を図り、課題を達成するためのさまざまな方法を習得することです。現在の能力で行える代償的な手段での運動獲得も含め、日常生活レベルでの運動(活動)の獲得を目指していくことを目的とします。
姿勢制御(ポスチャルコントロール)
姿勢制御は定位と安定性(バランス)があり、姿勢定位は「運動課題に関与する複数の体節間同士の関係、および身体と環境との間の関係を適切に維持する能力」1)、姿勢安定性は「基底面との関係で身体質量中心を制御する能力」1)と定義されます。
予測的姿勢制御
目で見た情報から今から起こる運動に必要な姿勢を、以前の経験を利用することによって中枢神経系が感覚系や運動系の活動を予測し調節するフィードフォワード形式で行われます。例えば、歩行中に事前に障害物をよけることや、重いと予測される荷物を持ち上げるための姿勢や筋の出力、ものを把持するときの手の形などの遂行時に安定性を維持する制御が行われています。
反応的姿勢制御
運動において予測しないことが起こった時に安定性を回復するために、運動時の体性感覚・視覚・前庭系からの情報を得て、計画している運動とのずれがないようにより良い姿勢を調整するフィードバック形式で行われます。例えば、歩行時に予測しないつまずきや滑りが生じた時に、バランスを立て直し、安定した姿勢へと運動を修正します。
歩行の制御
歩行は一度運動を開始すれば脊髄レベルの中枢性運動パターン発生器(CPG:セントラルパターンジェネレーター)によって自動的に継続されることがわかっています。歩行は無意識的に行われるパターン化した運動ではありますが、氷の上など滑りやすい道を歩くときには滑りにくいようにフィードフォワードによって姿勢・運動が調節され、滑るという予測しない事態が起こった時にはフィードバックによって安定させるための姿勢・運動が調節されます。
リハビリテーションにおいて、日常生活で変化する環境や課題に適応した歩行を目指すためには、ただ歩く機能の獲得だけではなく、あらゆる場面に適応できることが必要です。そのためには、一番効率の良い方法だけを獲得するのではなく、患者自身が自ら試行錯誤して課題遂行のための戦略を学び、場面に応じて修正していくことを促すアプローチが大切です。
参考文献
- モーターコントロール 運動制御の理論から臨床実践へ Anne Shumway-Cook Majorie H.Woollacott 医歯薬出版株式会社