福祉・介護を取り巻く技術とその社会実装
公開月:2022年11月
三浦 貴大(みうら たかひろ)
産業技術総合研究所人間拡張研究センター主任研究員
はじめに
日本国内の高齢化率は2021年に28.9%に達し、2065年には38.4%に達すると予想されている1)。医療費や社会保障費が継続的に増加し、さらなる労働人口の減少が続くと見込まれるこの日本で、限られたリソースをもとにどのように健康長寿社会を実現し続けるかが課題である。
特に2025年に37.7万人の介護者不足と見込まれている現状2)で、高齢者・介護者のための各種支援機器が急速に市場規模を広げている。このような高齢社会の諸問題を解決するための支援機器を研究開発する学際領域がジェロンテクノロジー(Gerontechnology:加齢工学、老年工学)である3)。Graafmansによると、生活領域の支援を目的として、技術課題を解決する方法論を取る3)。生活領域とはWHOが定義する第一次~第三次予防にQOL改善を加えた領域であり、技術課題は健康と尊厳・住環境と自立生活・移動・交流・就労/余暇活動の支援方策を含む4)。
具体的な研究対象をより簡略化すると、以下の5点に要約できる5)。
- 加齢現象の解明 (Improvement of research on aging):高齢者の認知・身体機能の低下やそれに伴う日常生活・社会活動の変化などに関する基礎研究と、その基盤計測手法の開発。
- 機能低下の予防 (Prevention):リハビリ技術などの機能低下を予防する技術の研究開発。
- 低下機能の補償 (Compensation):低下した機能を保障する技術開発。概して、高齢者の心身機能の支援と、製品や環境の改良研究に二分される。
- 社会的活動の向上 (Enhancement):就労・余暇活動を支援する技術やその導入方法論の研究。
- 介護者の支援 (Aid to caregivers):高齢者を支援する家族や介護者を補助する技術。国内では特に、排泄・入浴・移乗・見守り支援について研究がなされている6)。
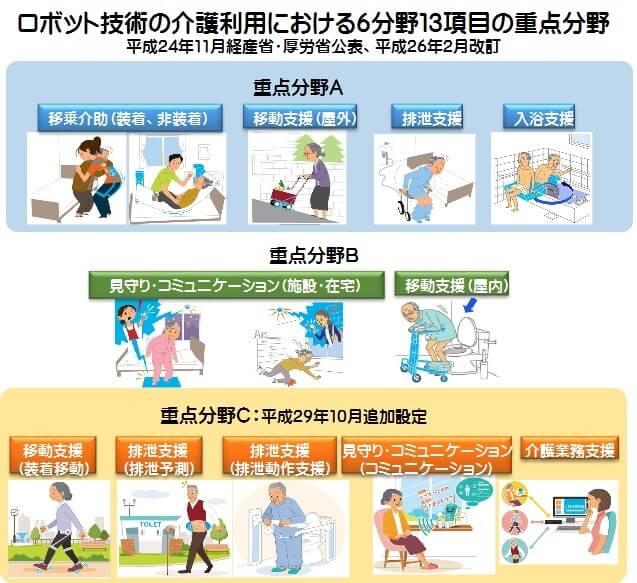
これらの研究対象に対応するべく、日本国内ではロボット技術・情報技術を活用した研究開発とその導入施策が行われてきた。特に、2013年より経済産業省・日本医療研究開発機構(AMED)はロボット介護機器開発・導入促進事業を、2017年よりロボット介護機器開発・標準化事業を行っている6),7)。これら事業は、介護を要する高齢者の増加に伴う介護負担の増大をロボット技術によって軽減すると共に、高齢者自信の自立促進を促すことを狙いとしたものである。図1に、本事業で定めたロボット技術の介護利用における重点分野を示す。これらの分野は、現場からの多くの要望があり、ロボット技術の利用が合理的な分野を厚生労働省・経済産業省の両省で選定したものである8)。具体的な分野は、移乗介助・移動支援・排泄支援・入浴支援・見守り支援・コミュニケーション支援・介護業務支援であり、20機種が製品化に至っている7)。
本稿ではこれらを大まかに、自立生活支援および介護支援に関する技術について概説する。
自立生活を支援する技術
主に、日常生活動作/手段的日常生活動作(Activity of daily living:ADL/Instrumental ADL:IADL)を支援する技術が含まれる。特に、本節では移動・リハビリ支援、排泄支援、家事支援に加え、コミュニケーション支援に関する技術が挙げられる。
1. 移動支援とリハビリ支援
移動支援においてはパーソナルモビリティ(街中での近距離移動を想定した1~2人が乗る小型移動支援機器)のほか、運転支援や自動運転の技術が挙げられる9),10)。特に、寝たきりにならないまでも、身体機能が低下してきている人たちの日常歩行を補助するシステムが開発されている。特に、製品化に至ったロボットアシストウォーカーRT.1(RT.ワークス)は、特に上り坂・下り坂において歩行能力に応じた補助を行える歩行アシストカートである11)。本カートの開発は、介護ロボット開発プロセスに基づいて行われており、歩行アシスト機器としては国内で初めてISO 13482(パーソナルケアロボットの安全性に関する国際規格)の認証を取得している。現状ではさらに、屋内での移動介助支援に加え、装着型の移動支援システムが研究開発段階にある7)。


一方で臨床現場におけるリハビリ支援では、人体に装着してアシストを行う外骨格型のパワーアシストロボットを用いた研究が数多くなされており12)、(2022年9月15日閲覧)や(2022年9月15日閲覧)などが特に知られている。国内的にも、(2022年9月15日閲覧)が医療機器承認を受けたことで、さまざまな臨床評価が進んでいる。HAL®は、皮膚表面で取得する生体電位信号に基づいて各関節のモータが作用し、装着者の(随意的) 身体動作をアシストする。現状では、筋萎縮性側索硬化症(ALS; Amyotrophic lateral sclerosis)などの神経筋疾患を対象とした医療機器承認を受けており13)、2022年10月にはさらにHTLV-1関連脊髄症(HAM; HTLV-1-associated myelopathy)などの対麻痺も承認範囲に加えられた14)。また、フレイル期にある高齢者の運動機能の維持・回復にも効果があることも報告されている15)。一方で、HAL®を用いた際の歩行段階ごとのアシスト量の違いが報告16)されており、今後さらなる精緻な研究成果が報告されると考えられる。なお、HAL®は介護者の移乗介助や介護動作の支援にも用いられており、腰部の負荷低減を見込まれている17)。


2. 排泄支援
日常生活動作の支援に当たり、プライバシーや尊厳の兼ね合いから排泄支援も重要である。排泄支援については、現状では排泄介護の容易化支援に加え、排泄予測、排泄動作支援に関して研究開発が行われている7)。初期の研究として、排泄介護の負担を軽減する支援ロボット「トイレアシストシステム」の研究が挙げられる18)。本システムは、被介護者のトイレへのアプローチ支援機能、被介護者の着座支援機能、被介護者の姿勢保持支援機能、介護者の行う洗浄・清拭動作支援機能など、排泄介護動作を総合的に支援できるものである。この成果をもとに、本装置の全体の製品化ではなく、立ち上がり動作のみを支援する(2022年12月20日閲覧)が製品化されている。同時期には、マインレット爽®(プロモート)など、排泄ケアの介護負担軽減を行うおむつ型システムが製品化されている。

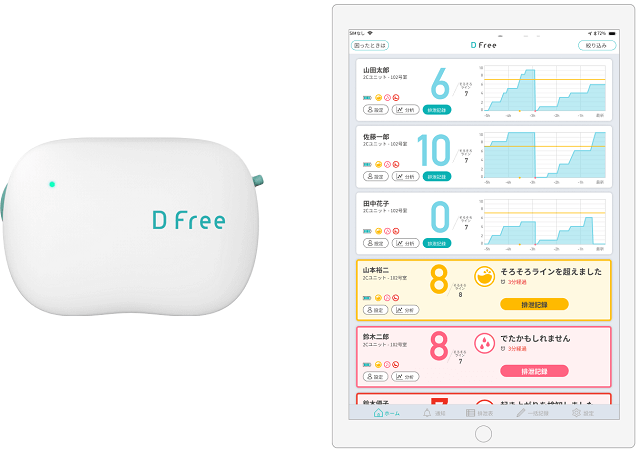
一方で、排泄予測に関しては、(2022年9月15日閲覧)が好例である。超音波センサにより膀胱の膨らみを検知のうえで、排尿タイミングをスマートフォンに通知するものである。また、排泄動作支援において、前述したトイレリフト®以外にも、(2022年9月15日閲覧)が挙げられる。本装置は、装着された体幹支持具を用いて立ち上がり支援を行う装置である。以上のように、排泄支援においては、自立・介護の両面から支援できるシステムが開発・製品化に至っている。
3. 家事支援とその効率化を支援するインタフェース
家事支援技術においては、ロボットやネットワークの技術による自動化が進んでいる。家庭に入るロボット技術の最初期の実用化例として自動掃除ロボットの(2022年9月15日閲覧)を始め、さまざまな情報家電が登場し、家事の負担は減少してきた。最近では、より賢い情報家電が登場しており、ネットワークを介して効率よい支援を行える状況になっている19)。さらに、情報家電を音声操作するための機能がスマートスピーカに実装され、家庭内に設置された機材の操作や情報取得の容易化が進んでいる。国内では、2017年に大和ハウスが(2022年9月15日閲覧)を用いた(2022年9月15日閲覧)を発表している。
一方で、スマートスピーカによる各種自動化を効率化するうえで、(2022年9月15日閲覧)との連携が進んでいる。IFTTTとは、アプレット(旧名:レシピ)と言われるワークフロー自動化の記述内容を作成するものである。アプレットはイベント発生トリガーと実行内容のようなルールからなるが、アプレット内容には制約があり似通ったものになりがちである。Srinivasanらは、IFTTTのルール生成・選択支援を行うRuleSelectorを開発し、ユーザスタディから、リマインダと通知に関するルールがよく使われたと報告した20)。Yoshizakiらも、高齢者自身が情報家電の挙動をプログラムする仕組みを構築・評価を行い、彼らにおける技術受容が進みうる可能性を報告した21)。以上より家事支援においては、情報家電の高機能化に加え、利用者におけるカスタマイズ性の強化も進んでいくだろう。
4. コミュニケーション支援
コミュニケーション支援技術においては、人間に近いコミュニケーションを模擬するコミュニケーションロボットが数多く開発された。概して、バーバルまたはノンバーバルコミュニケーション(言語/非言語コミュニケーション)を行うロボットに分類できる。前者は記憶支援などの日常生活支援、後者はセラピー支援に用いられている。
前者における好例は、PaPeRo®(NEC)や(2022年9月15日閲覧)である。特にPALRO®は顔認識・音声認識を備えるほか、対話機能を有しており、ダンスなどのレクリエーションを提供可能である。これらロボットを用いることで、在宅・介護施設における認知症高齢者の記憶想起支援などに効果がある点が報告されている22),23)。なお、これらのロボットについては、見た目の馴染みやすさ・直感的使いやすさが高齢者の受容性喚起に重要である旨が報告されている24)。また、井上らはフィールド・ベースト・イノベーションと銘打って、さまざまな身体状況にある高齢者でPaPeRo®を用いた意思決定支援(スケジュール提示など)の効果を継続的に評価している25)。さらに、最近ではロボットの行動決定に当たって、利用者に対する個別化のための機械学習手法および現場への導入手法が研究されており26)、人に寄り添うロボットが今後創出されうる状況にある。
一方で、後者の利用法はロボットセラピーと言われており、(2022年9月15日閲覧)や(2022年9月15日閲覧)が挙げられる27),28)。PARO®はアザラシ型ロボットであり、アニマルセラピーと同じセラピー効果があると報告されている27)。一方、Hugvie®は人間を簡略化した形状の音声通話システムであり、利用者の一方または双方がこれに抱きつきながら会話を行うものである。Kawamuraらは、高齢者介護施設の入居者において本システムの効果を検討しており、セラピー効果などがあったと報告している28)。なお、ロボットセラピーには、柔らかい触感が重要であるとの報告がある29)。セラピーに効果的なロボットのあり方やその導入方策は今後の課題であろう。

介護者を支援する技術
主に、介護者の負担軽減のための技術が挙げられる。具体的には、前述した自立生活支援技術に加え、見守り支援技術が挙げられるほか、介護現場の情報支援技術が挙げられる。
見守り支援については、大きく可搬型と設置型に分類できる30)。前者はモバイル/ウェアラブル装置であり、活動状況や睡眠のモニタリング装置が製品化に至っている。後者は特定の建物に設置するか建物自体がモニタリング装置になる場合である。設置型の例は、カメラや赤外線を利用したシステムが挙げられる。建物自体がモニタリングを行う研究例では、(2022年9月15日閲覧)やウェルフェアテクノハウス※1が有名である31),32)。これらの建物では、居住者の活動状況や生理データのほか、転倒などの緊急状況を、リビングルームや風呂場などに取り付けたセンサ情報をもとに取得できる。また、東大ロボティックルームの場合は、これらセンシング技術に基づいてロボット技術による支援を行える仕組みも行っていた33)。その後、センシングに特化する形で東大センシングルームの取り組みが行われ、一部成果がフレイル傾向にある高齢者の見守り支援にも用いられた33)。製品化された例としては、(2022年9月15日閲覧)や(2022年9月15日閲覧)などが挙げられる。
※1 「ウェルフェアテクノハウス」とは、介護の必要な高齢者や障害者に優しい住環境・福祉機器を研究開発するために、通商産業省(現在の経済産業省)工業技術院における「医療福祉機器技術開発研究制度」事業のもとで設置された施設。

情報支援技術に関しては、介護情報の自動生成や構造化が挙げられる。自動生成については、介護現場のカメラ映像から身体動作データを抽出のうえで、日誌テキストを生成した研究例が挙げられる34)。一方で、介護情報の構造化については、申し送り内容を対象とするDANCE (Dynamic Action and kNowledge assistant for Collaborative sErvice fields)、業務内容・頻度・場所などの記録を対象とするQuality Study、業務プロセス・サービス環境の設計情報を対象とするDRAW(Design Representation tool for Autonomous Work systems)といった、一連の介護技術に関するスキルや業務に関する「コト・データベース(コトDB)」研究の成果物が挙げられる32)。これらでの構造化情報をもとに、介護現場の情報統合をめざしたオントロジー(特定分野の情報を構造化する基本概念とその体系)開発が進められており、介護サービスの現場理解とプロセス再設計への利用が見込まれている35)。
まとめ
福祉・介護に関する技術動向および社会実装状況について概説した。今後、本分野における技術活用がより進展し、高齢者やその支援者におけるwell-beingのさらなる向上を期待している。
文献
- (2022年9月15日閲覧)
- (2022年9月15日閲覧)
- Graafmans JAM: The history and incubation of gerontechnology, Gerotechnology: Research and Practice in Technology and Aging, Springer, 2004: 3-11.
- Bouma H, Fozard JL, van Bronswijk JEMH: Gerontechnology as a field of endeavour, Gerontechnology 2009; 8(2): 68-75.
- 口ノ町康夫: 高齢社会を活性化する研究分野「ジェロンテクノロジー」に関する総論, 人間生活工学 2004: 5(2): 1-3.
- 梶谷勇, 本間敬子: ロボット技術の介護分野での研究開発と利活用について, 医機学 2019; 89(4): 378-382.
- (2022年9月15日閲覧)
- 丸岡 亮, "介護福祉のための研究開発の動向 《第1回》ロボット介護機器開発・導入促進事業について," 計測と制御, 55(7):614--615, 2016.
- 鎌田実: パーソナルモビリティの現状と知事連合の取組み紹介, 日本生活支援工学会誌 2012; 12(1): 8-12.
- 永井正夫, ポンサトーン・ラクシンチャラーンサク: 高齢者の自立を支援し安全安心社会を実現する自律運転知能システム, 精密工学会誌 2015; 81(1): 2-29.
- 藤井仁, 河野誠: ロボットアシストウォーカーRT.1の開発, 日本ロボット学会誌 2016; 34(4): 254-259.
- 田中敏明, 杉原俊一: ロボットと理学療法―現状と展望, 理学療法ジャーナル 2021; 55(4): 453-459.
- 中島孝, HAL®医療用下肢タイプによる歩行運動療法, The Japanese Journal of Rehabilitation Medicine, 54(1), pp:14--18, 2017.
- (2023年4月11日閲覧)
- Naoya Kotani, Takashi Morishita, Aya Yatsugi, Shinsuke Fujioka, Satoshi Kamada, Etsuji Shiota, Yoshio Tsuboi, Tooru Inoue, Biofeedback Core Exercise Using Hybrid Assistive Limb for Physical Frailty Patients With or Without Parkinson's Disease, Frontiers in Neurology, vol.11, Article No. 215 (10 pages), 2020.
- Tanaka T, Matsumura R, Miura T: Influence of Varied Load Assistance with Exoskeleton-Type Robotic Device on Gait Rehabilitation in Healthy Adult Men, Int J Environ Res Public Health. 2022; 19(15): 9713.
- Miura K, Kadone H, Koda M, et al.: The hybrid assistive limb (HAL) for Care Support successfully reduced lumbar load in repetitive lifting movements, J Clin Neurosci. 2018; 53: 276-279.
- 本間敬子, 松本治, 小野栄一ほか: 排泄介護総合支援ロボット「トイレアシスト」の研究開発, バイオメカニズム学会誌 2008; 32(4): 195-201.
- Hoy MB: Alexa, Siri, Cortana, and More: An Introduction to Voice Assistants, Medical reference services quarterly 2018; 37(1): 81-88.
- Srinivasan V, Koehler CJ, Jin H: RuleSelector: Selecting Conditional Action Rules from User Behavior Patterns, Proc. IMWUT. 2018; 2(1): 1-34.
- Yoshizaki R, Kang SooIn, Kogami H, et al.: Design and Verification of a Smart Home Management System for Making a Smart Home Composable and Adjustable by the Elderly, LNCS. 2022; 13331: 134-153.
- Osada J, Shinichi Ohnaka S, Sato M: The Scenario and Design Process of Childcare Robot, PaPeRo, Proc. ACM ACE '06; 80-es, 2006.
- Inoue K, Sakuma N, Okada M, et al.: Effective Application of PALRO: A Humanoid Type Robot for People with Dementia, LNCS. 2014; 8547: 451-454.
- Miura T, Goto T, Kaneko K, et al.: Need and impressions of communication robots for seniors with slight physical and cognitive disabilities: Evaluation using system usability scale, IEEE Int. Conf. SMC 2016: 4088-4092.
- 井上剛伸: フィールド・ベースト・イノベーションに基づく生活支援ロボットの地域コミュニティでの開発, 日本ロボット学会誌 2016; 34(5): 304-308.
- Ostrowski AK, Breazeal C, Park HW: Long-Term Co-Design Guidelines: Empowering Older Adults as Co-Designers of Social Robots, Proc. IEEE RO-MAN '21: 1165-1172, 2021.
- Wada K, Ikeda Y, Inoue K, Uehara R: Development and preliminary evaluation of a caregiver's manual for robot therapy using the therapeutic seal robot Paro, Proc. IEEE RO-MAN '10, 533-538, 2010.
- Kuwamura K, Sakai K, Ishiguro H, et al.: Hugvie: A medium that fosters love, Proc. IEEE RO-MAN '13: 70-75, 2013.
- 林里奈, 加藤昇平: ロボット・セラピーにおける柔らかい触感の重要性. 日本感性工学会論文誌 2019; 18(1): 23-29.
- Allet L, Knols RH, Shirato K, de Bruin ED: Wearable systems for monitoring mobility-related activities in chronic disease: a systematic review, Sensors. 2010; 10(10): 9026-9052.
- Kientz JA, Patel SN, Jones BD, et al.: The Georgia Tech Aware Home, Proc. ACM CHI EA '08: 3675-3680, 2008.
- Tamura T, Kawarada A, Nambu M, et al.: E-healthcare at an experimental welfare techno house in Japan. Open Med Inform J. 2007; 1: 1-7.
- 森武俊: 居住環境モニタリングと見守りセンシング技術, 光技術コンタクト 2016; 54(7): 12-20.
- Takano T, Lee H: Action description from 2D human postures in care facilities, IEEE Robotics and Automation Letters. 2020; 5(2): 774-781.
- 西村悟史, 福田賢一郎, 西村拓ほか: 介護現場の情報統合のためのオントロジー開発─介護機器開発への応用可能性─, 人工知能 2020; 35(2) : 170-178.
筆者

- 三浦 貴大(みうら たかひろ)
- 産業技術総合研究所人間拡張研究センター主任研究員
- 略歴
- 2011年:東京大学大学院情報理工学系研究科博士課程修了、博士(情報理工学)、産業技術総合研究所ヒューマンライフテクノロジー研究部門特別研究員、2012年:東京大学大学院情報理工学系研究科特任助教、2014年:東京大学高齢社会総合研究機構特任助教、2018年:産業技術総合研究所人間情報研究部門研究員、2020年より現職
- 専門分野
- 福祉工学、ヒューマンインタフェース、アクセシビリティ
以下をクリックすると機関誌の内容をご覧になることができます。
尚、当記事は、PDFに掲載している情報を更新し、最新情報を掲載しています。
WEB版機関誌「Aging&Health」アンケート
WEB版機関誌「Aging&Health」のよりよい誌面作りのため、ご意見・ご感想・ご要望をお聞かせください。
お手数ではございますが、是非ともご協力いただきますようお願いいたします。